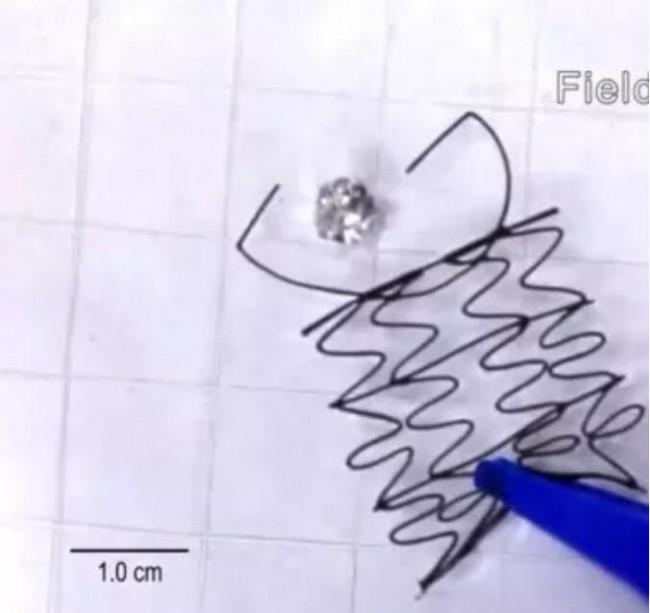
北卡罗来纳州立大学的研究人员使用3D打印技术制造了一个柔性网状结构。当该结构浮在水面上时,可以通过施加的磁场进行控制。这些结构可以抓住小物体并携带水滴。这一3D打印柔性材料将可能用于制造模拟水生生物的软机器人,或者可以制造培养细胞的组织支架。
在视频中可以看到,3D打印柔性结构可以“抓住”一个小小的铝箔球,以及可以“携带”水滴,网状结构可以“按需”释放水滴。
这项研究展示了3D打印与软机器人技术相结合的能力。
![]() 牙膏状的硅树脂3D打印材料
牙膏状的硅树脂3D打印材料
图片来源: North Carolina State University。
根据 的了解,制造这种柔性网状结构的3D打印材料为有机硅微珠“墨水”,该墨水由液态有机硅结合并包含在水中,由此产生的“同质复合触变膏”材料类似于普通牙膏。这种膏状材料也如同牙膏一样易于挤出,挤出后保持其形状而不会滴落。
在研究中,研究人员使用3D打印机将膏状的制造为网状结构,打印完成后进行固化,从而得到柔性硅树脂结构。通过施加磁场可以控制该结构,例如使其拉伸和塌陷。
了解到,通过这种自增强膏状材料,研究人员可以创造出超柔软和柔韧的结构。通过嵌入具有高磁化强度的羰基铁颗粒,研究人员能够使磁场梯度产生强烈反应。
通过这一材料制造的柔性结构,可以向各个方向扩展和收缩。研究人员利用3D打印技术在施加磁场之前和之后控制形状。
研究团队表示,这项研究的应用前景包括漂浮在水上模仿水生生物,或模仿体内的活体组织。就目前而言,这项研究是软性机器人的早期概念验证。
与这项研究相关的论文“3D-Printed Silicone Soft Architectures with Programmed Magneto-Capillary Reconfiguration” 已发表在Advanced Materials Technologies 期刊中。
![]() Review
Review
在软体机器人方面, 层介绍过弗吉尼亚理工的研究人员在2018年创建了具有编程刚度的3D打印多材料,这种由不同材料制成的微晶格结构。这种多材料可编程刚度的3D打印技术允许打印不同模量的材料。
通过编程可以实现变形能力控制 – 精确布置在不同的方向拉伸和变形量。使用普通材料时,单向拉伸会导致材料向相反方向收缩。而弗吉尼亚理工大学这种新的专利工艺和设计允许设计人员在一个构建中创建非常具体的模量分布,以允许编程变形 – 在整个材料范围内可以发生程序扩张或收缩。
不仅仅是弗吉尼亚理工大学,如何定义零件在不同的部位用什么样的材料,不同的零件之间如何连接,材料的定义如何与要实现的功能结合起来,这是多材料打印的难题。而麻省理工学院计算机科学和人工智能实验室(CSAIL)于2016年就在多材料打印领域取得了巨大进步,他们开发了名为Foundry的面向多材料设计的软件,使得多材料3D打印更容易、更精确的。
而哈佛大学也在软件领域为多材料的3D打印提供了可行性,哈佛大学的研究人员能够量化材料弯曲的各种不同的方式,并计算这样的运动会如何影响像刚度这样的特性。他们现在可以使用他们的数字框架快速循环几百万种不同的图案,让电脑通过理想的属性设置给定一个恰当的设计。一旦一个给定的设计被选中,科学家们能够使用多材料3D打印机以及激光切割纸板、双面胶带等材料组合来创造超材料的原型。
总体来说,3D打印在软体机器人领域的应用,材料科学发挥了重要的作用。
资料下载,请加入
3D产业链QQ群:529965687
更多信息或查找往期文章,请登陆www.51shape.com,在首页搜索关键词
网站投稿请发送至2509957133@qq.com