3D打印的一大优势在于功能集成,之前,我们往往将功能集成局限地理解为通过结构的优化实现的功能集成。而如今,麻省理工又一次以事实告诉我们:想象无极限!固体与液体也可混“打”。
麻省理工学院计算机科学和人工智能实验室的研究人员(CSAIL)成功打印出第一个3D打印功能型机器人,机器人由固体材料组成,通过液体压力驱动。这些液压驱动的机器人在打印完成后即可以从商业上可用的三维打印机和“走出去”的机器,几乎没有组装要求。
麻省理工将这种方法称为“打印流体力学”,增材制造技术一直是非常困难和耗时的,将液压元件(使用流体有效地控制机械力)打印到机器人上更是难上加难。其次,虽然许多先进的3D打印机配备多个挤出头,可以用于3D打印各种材料,如刚性和柔性材料,而同时打印液体和固体就更难了。
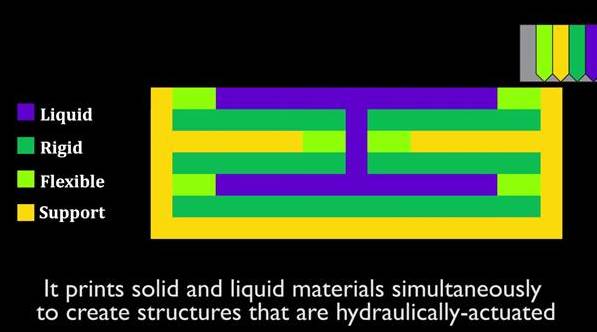
麻省理工的“打印流体力学”通过使用inkjet喷墨3D打印机的技术来完成,打印液滴的直径为20-30微米,逐层进入3D对象,每一层由聚合物材料组成,在紫外光下固化。当然这种固化是有选择性的,打印机同时打印固体和液体材料,打印的固体材料成为液压系统的支撑部分,没有固化的液体材料则成为液压系统中传输动力的介质。

在选择喷墨打印技术之前,麻省理工尝试了多种不同的打印技术,最后发现喷墨打印技术可以有八种不同的打印头用来沉积不同的材料,这些打印头彼此相邻,联动完成打印过程。这使得固体和液体的材料结构变得可编程化,能够实现打印复杂的,预设流体通道的功能结构件。
麻省理工创造的机器人是令人印象深刻的,只需要插入电池或者电机,这些小家伙们可以“走”着从打印机中出来。麻省理工示范了两个机器人的打印,一个是带有六条腿的3D打印机器人,通过内部12个液压泵的驱动;另一个是3D打印软机械手夹持器,可用于Baxter机器人的研究。
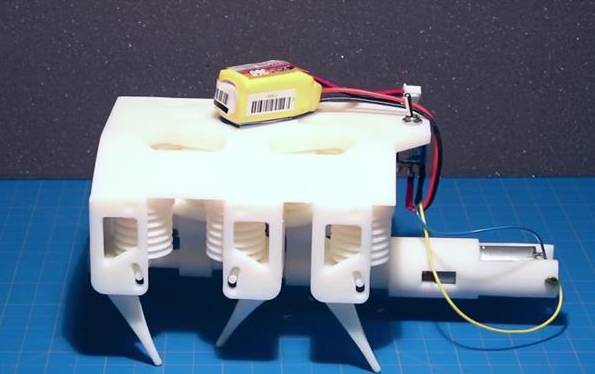

小的六足机器人(重达1.5磅,厚度不到6英寸长),只需要一个单一的直流电机来驱动,除了电池,每一个组件都是三维打印的,而且一次完成,整个打印只需要22个小时就完成了。
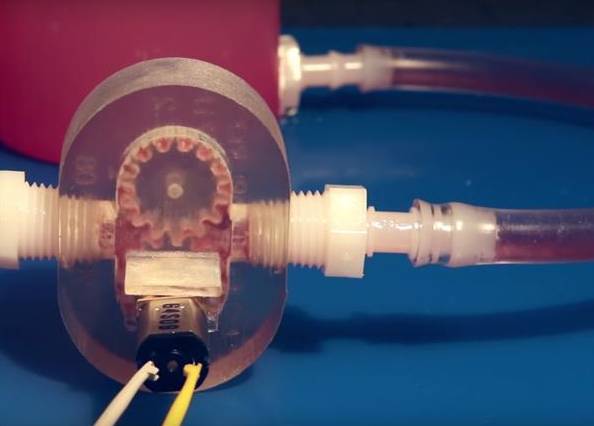
组件中关键的部分包括几个功能型的波纹管,用于推进流体压力;还有3D打印的齿轮泵,用来产生连续的流体流动,并转化为机械力;此外,还有一个旋转曲轴,用于驱动液压传动。
至于软机械手夹持器,3D打印的硅橡胶材料与流体驱动的手指,向着未来人机交互(HCI)迈出关键的一步,3D打印功能型的液压系统将加快软机器人的开发与发展。
麻省理工的CSAIL团队认为这些3D打印机器人具有现实的应用价值,包括能够加速成本有效的3D打印液压系统的开发过程。而这些机器人今后可以用于投入救灾或其他危险的环境中。
版权声明©
网络转载必须注明来源